Ve spolupráci s VUT v Brně vznikla úspěšná bakalářská práce, jejímž tématem byl návrh designu robota založeného na technologii tryskání suchým ledem. Hlavním cílem autora práce Bc. Viktora Novotného bylo vymyslet konstrukční řešení, které bude použitelné v různých typech prostředí a situací, ve kterých je robot schopný fungovat. Tato inovace by umožnila širší využití tohoto speciálního zařízení v potrubí různých velikostí a tvarů.
Naše firma je největší firmou v ČR zabývající se čištěním vzduchotechniky. Jsme špičkou v oboru v rámci Evropy, proto jsme mohli Fakultě strojního inženýrství – Ústavu konstruování poskytnout řadu technických informací ohledně robotických zařízení a reálného prostředí, ve kterém pracují. Disponujeme několika typy vlastních robotů a naše oddělení vývoje se stále intenzivně věnuje jejich inovaci.
Využití robotického zařízení je ideální možností, jak čistit či provádět inspekce vzduchotechnických potrubí, které jsou lidem těžce nebo zcela nepřístupné. Použití robota ve spojení se suchým ledem představuje nejmodernější zařízení pro čištění odtahů. Suchý led je v současné době svými vlastnostmi ideálním médiem pro čištění vzduchotechniky. Rychlost tryskání malých částic (pelet) suchého ledu dosahuje nadzvukové rychlosti, tato síla je dostatečná pro odstranění velkého množství typů nečistot. Čištěný povrch není mechanicky narušován a je zbaven všech druhů plísní, virů a bakterií.

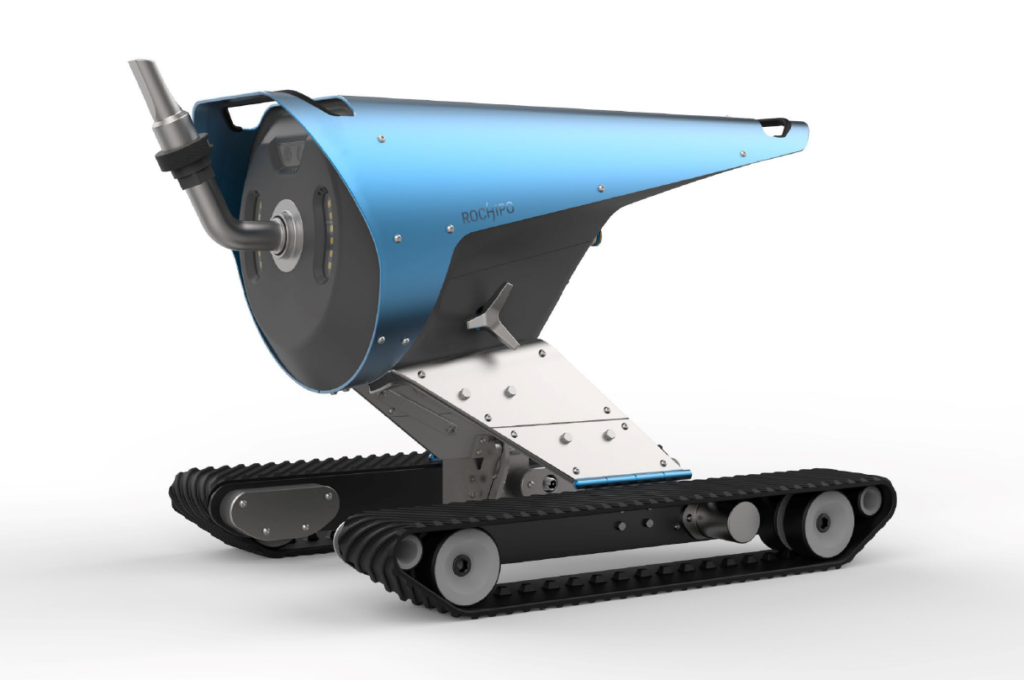
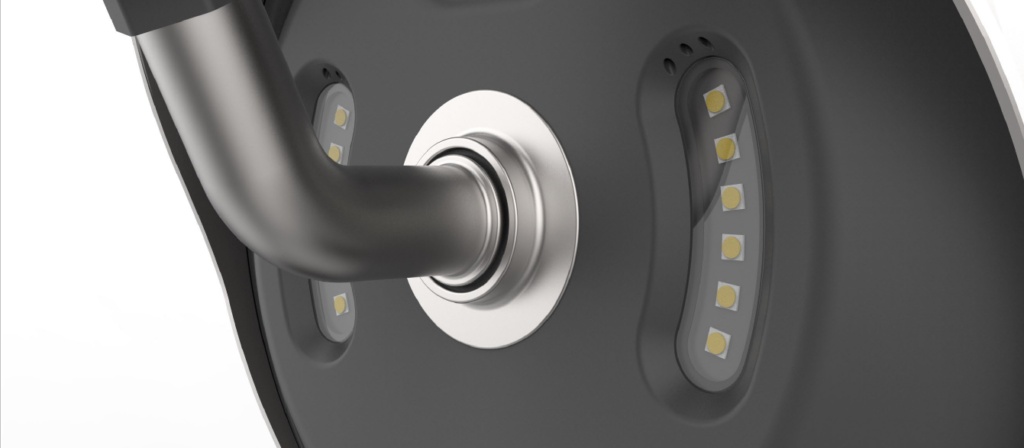
Popišme si nyní stručně, jak navržený robot vypadá. Zjednodušeně je robot otočná tryska na kolečkách nebo pásech. Suchý led je přiváděn tlakovou hadicí z tryskacího zařízení, kde se dávkuje suchý led do proudu stlačeného vzduchu. Aby mohl operátor řídit pohyb robota, je nutností přítomnost kamery a zároveň i dostatečné osvětlení. Největším konstrukčním oříškem je volba, jakým způsobem se bude robot pohybovat – kola či pásy? Podle tvaru potrubí jsou zvoleny takové komponenty, které umožňují náklon, minimální tření a maximální stabilitu robota v potrubí.

Z dalších vlastností , na které je kladen důraz, je nízká hmotnost, která umožní snadnou manipulaci, odolnost proti špíně a mechanickému poškození a lehká omyvatelnost.
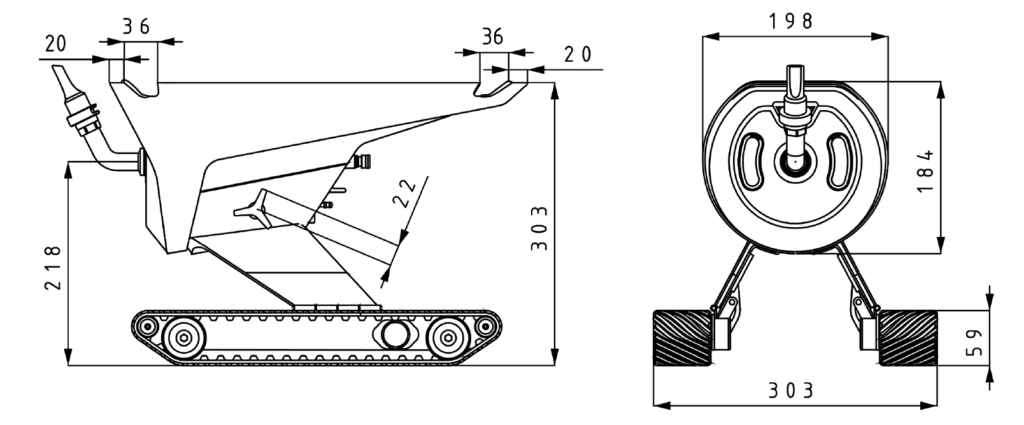
Výstupem práce bylo navržení tří modelů robotického zařízení, se snahou o co nejjednodušší konstrukci, jednoduchou výrobu a údržbu. Odlišnost variant je dána především ergonomickým řešením. Pohyb zařízení je vyřešen pásy, které jsou schopny náklonu. Díky jejich velké ploše se zvyšuje tření mezi plochami a zvyšuje tak stabilitu pohybujícího se zařízení. Vysoká hmotnost robota byla kompenzována modulárním řešením a umístěním tří madel na trup, čímž se zjednodušila manipulace pro obsluhu. Nedostatečnost robota samostatného pohybu vertikálními či strmými úseky potrubí byla vyřešena přidáním tzv. třetí nohy a přídavného lana. Třetí noha je schopna při spuštění centrovat polohu trysky vůči stěnám potrubí. Ideální polohy osy trysky při čištění můžeme dosáhnout pomocí výškové nastavitelnost robota a roztažitelnosti jeho nohou s pásy.
Vždy nás velmi těší, když můžeme podpořit studenty ve zkoumání nejen našeho oboru podnikání. Propojení teorie a osobní zkušenosti s průmyslovými aplikacemi v praxi považujeme za zásadní pro kvalitní vzdělání a posouvání vývoje vpřed. Vždy rádi studentům pomůžeme a oceňujeme jejich snahu a zájem.





